Welcome to my portfolio. Here you can follow my work and projects. PS: the images, videos, and models may take some time to load.
About Me

Hello! I'm Suvrat, a Mechanical Engineering graduate now pursuing my Master's with a focus on robotics. Every day I strive for excellence, push myself to refine my skills and learn from others through hands-on projects and academic pursuits. I believe that competency drives success. Right now, my fascination with how machines perceive and interact with the world has me building robotic “eyeballs” at the Safe Robotics Lab. I'm always exploring new ideas for personal projects, so I am exploring ideas on developing a product-level coffee grinder that improves the user experience. Outside of engineering, I’m a coffee nerd experimenting with new pourover recipes and diving deep into fermentation and roasting techniques for light roasts. When I’m not tinkering with robots or brewing coffee, you’ll likely find me playing volleyball, climbing, or training.
My Projects
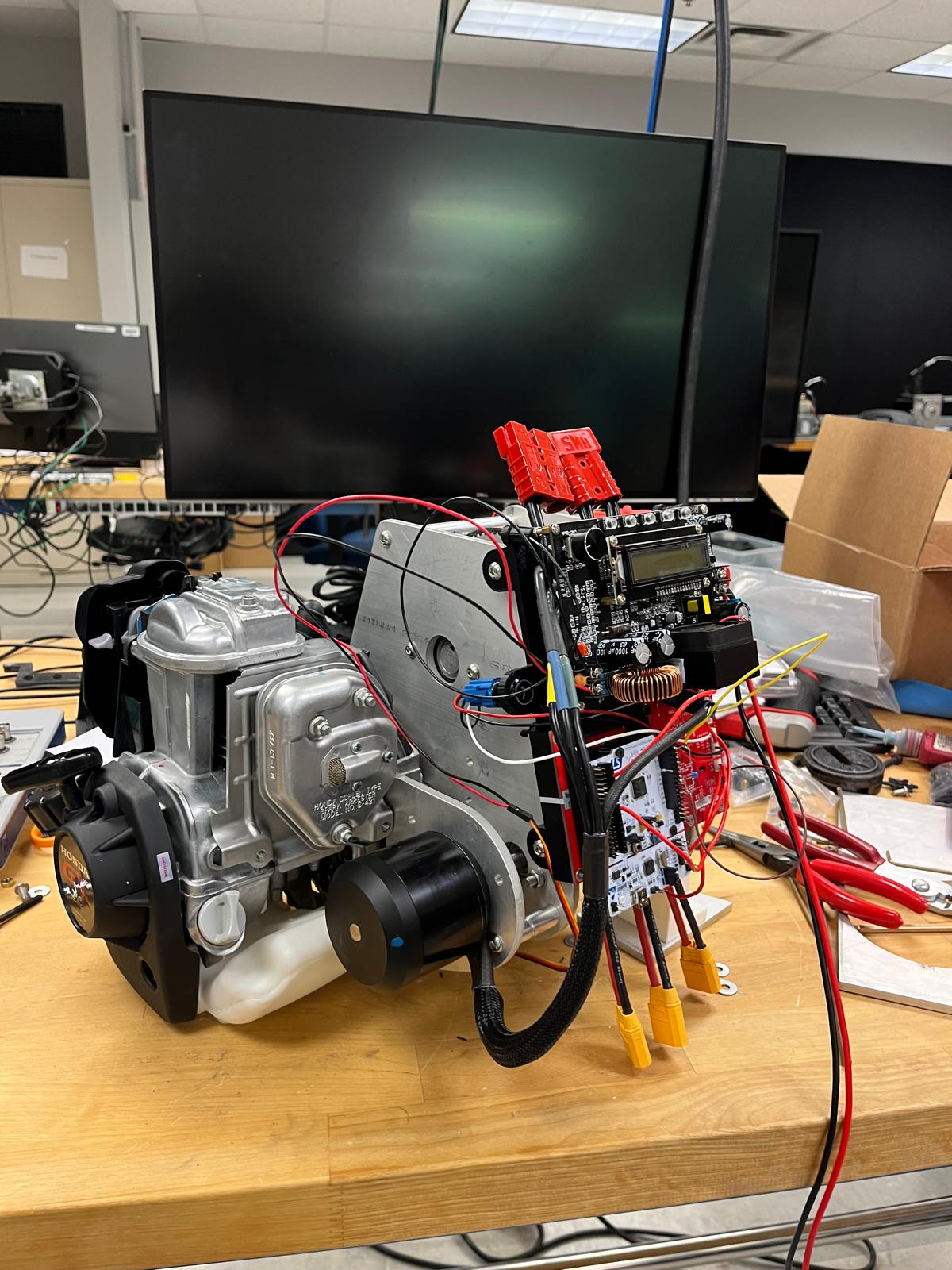
Compact Hybrid Powerplant
Engineered a 29 lb compact transmission integrating a 50 cc Honda GX50 and 4 kW BLDC motor. Delivers 34 Nm peak torque, 36-mph top speed, and extends e-bike range from 25 to 71 miles. Implemented STM32 controls for seamless mode transitions.
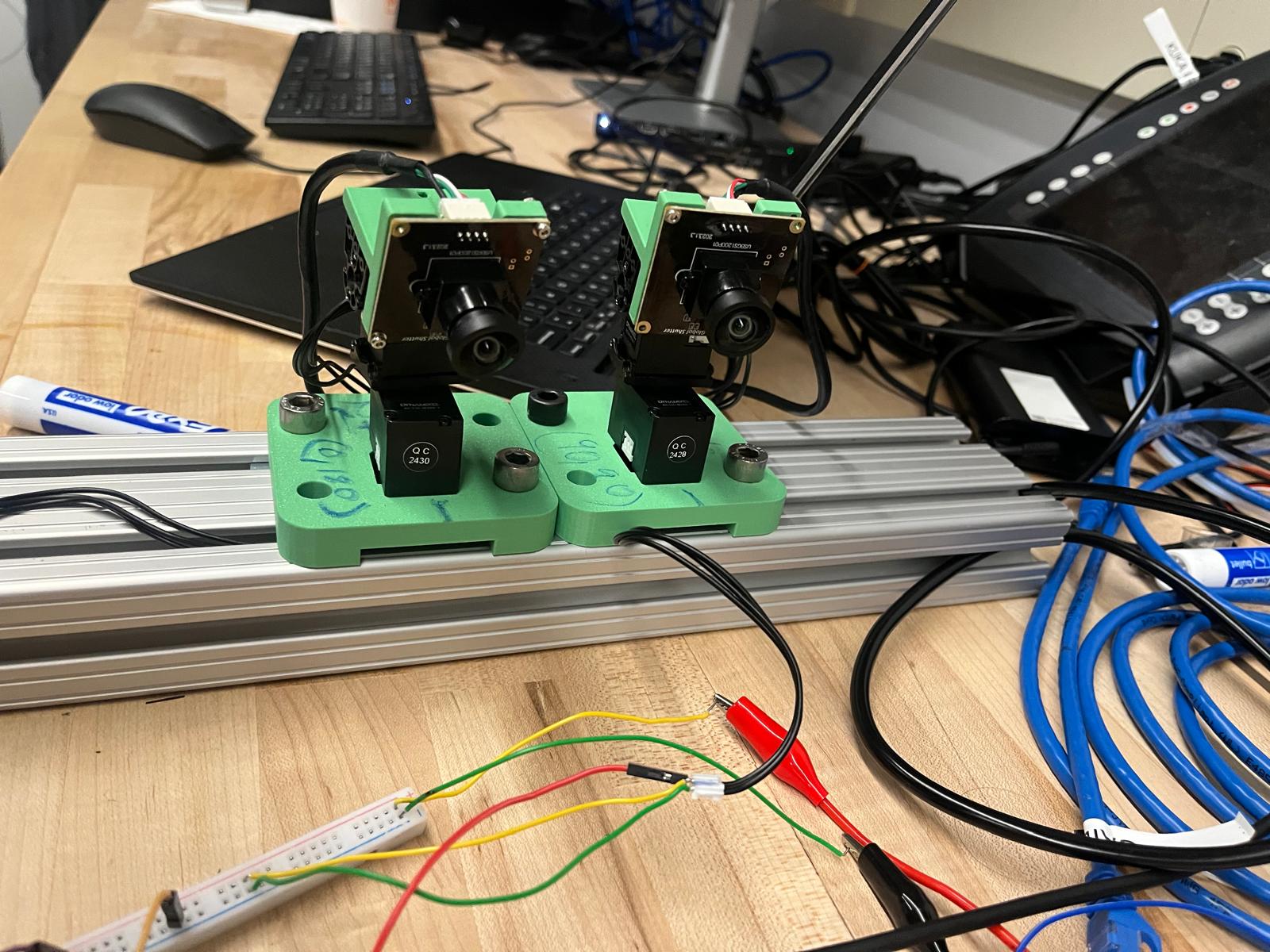
Project Eyeball
This project explores an active stereo vision system inspired by human foveation to obtain accurate depth estimates for a region of interest without relying on expensive LiDAR or RGB-D cameras. Implements vergence control depth estimation using dual 2-DOF gimbals.
Robotics Competition Robot
Collaborated on a budget-constrained automated robot to place objects in an arena under 30s. Designed a linkage arm for a sub-1s task completion and used Arduino/C++ to control pneumatics, motors, and linear actuators.

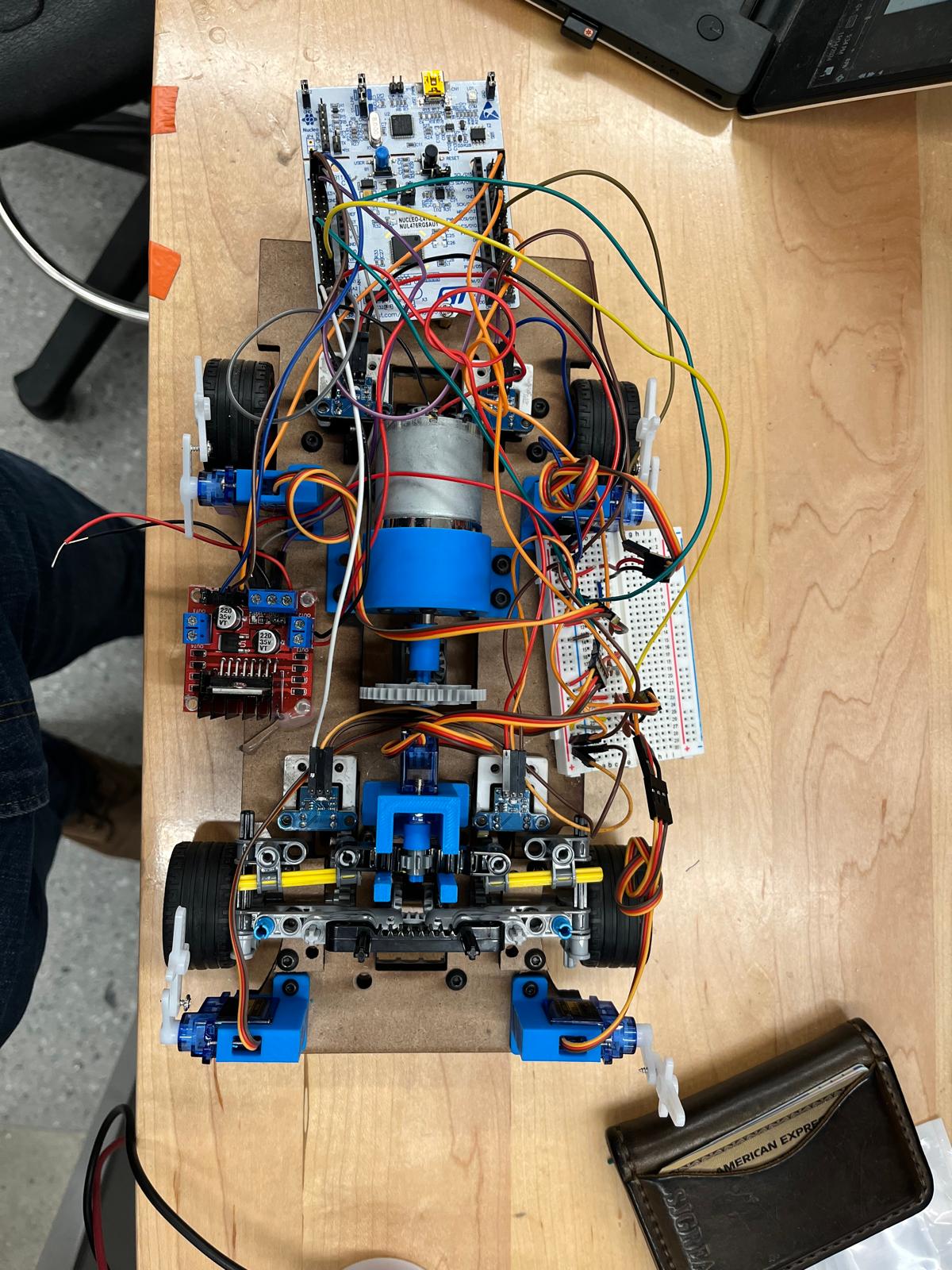
4x4 IR Controlled Car
Built a proof-of-concept 4x4 car for traction control. The system automatically detected wheel slip and applied brakes, allowing navigation of difficult terrains. Utilized an STM32 microcontroller with various sensors and PID control.
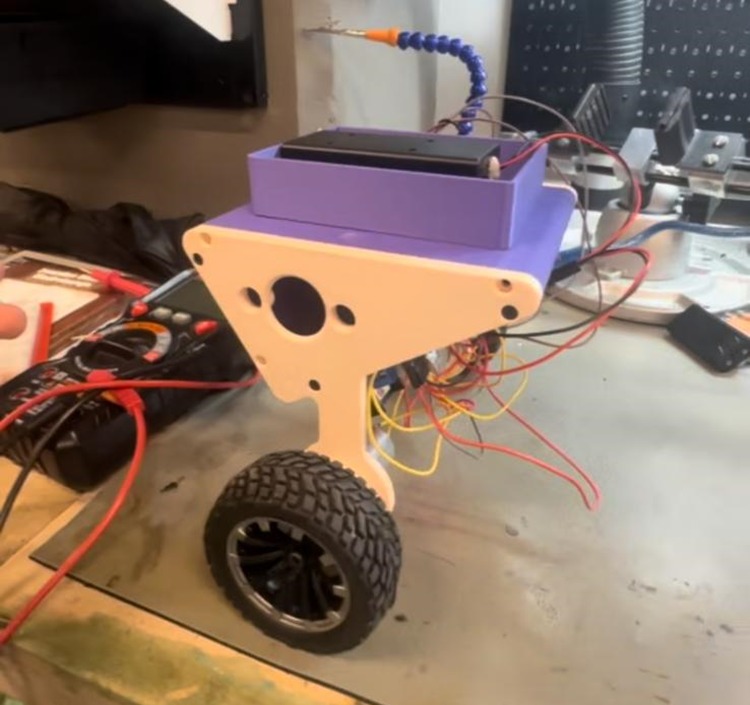
Self-Balancing Robot
Designed a two-wheeled self-balancing robot with an Arduino, IMU, and encoders. Implemented two PID-based controllers for pitch and velocity, enabling the robot to move while maintaining balance.
3-RRR Spherical Parallel Manipulator
Designed a 3-DOF spherical parallel manipulator for robotic vision applications.
Resume & Experience
Experience
Research Assistant (Project Eyeball)
Safe Robotics Lab
Making an asymmetric stereo camera setup utilizing cameras of different focal lengths to simulate human foveation, enabling accurate depth information acquisition. Implementing a vergence control depth estimation method for two 2-DOF gimbals moving relative to each other.
Hardware Engineer
Amazon Robotics
Designed and optimized sensor enclosures using SolidWorks, focusing on DFM/DFA. Developed vibration damping mounts to eliminate camera failures and designed a lightweight, high-strength steel repair platform, reducing repair times by 66%.
Robotics Project Engineer
Amazon Robotics
Led package automation and kickout improvement projects. Analyzed error logs and downtime to identify issues, proposing solutions that saved over $500K annually and improved efficiency.
Research Student - Nanoscale Manufacturing
Georgia Tech Manufacturing Institute
Built a slicing and motion control system using piezo-electric motors. Created a microscale mechanical ruling system capable of producing precise diffraction gratings.
Education
M.S. in Mechanical Engineering, Robotics Concentration
Georgia Institute of Technology, Atlanta, GA
B.S. in Mechanical Engineering, Robotics Concentration
Georgia Institute of Technology, Atlanta, GA (GPA: 3.8)
Skills
Tools & Software
Design & Manufacturing
Controls & Robotics
Get In Touch
I'm currently available for new opportunities. If you have a project in mind or just want to connect, feel free to reach out.
mastersuvratjain@gmail.com